







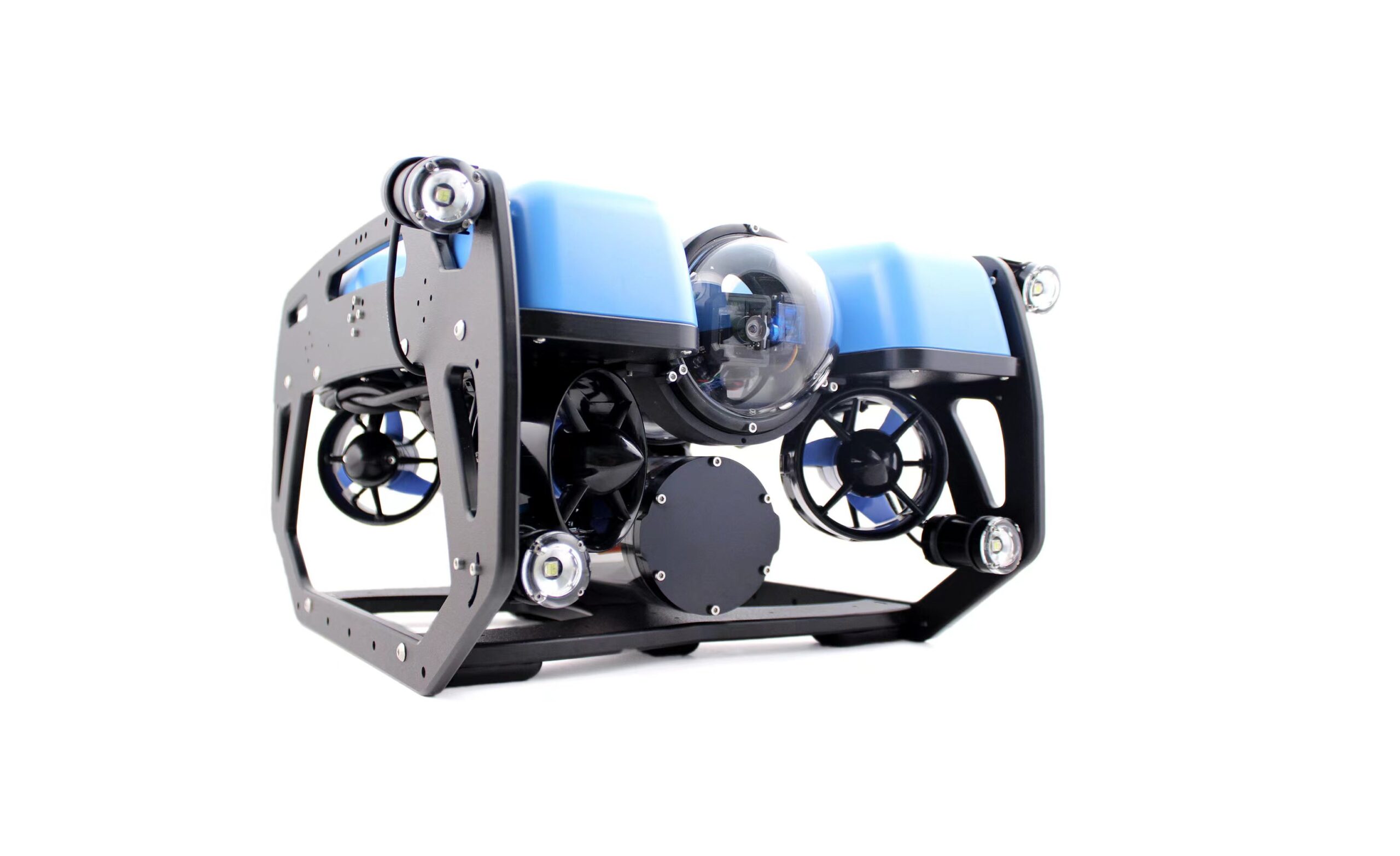


KX-UR-300 Underwater Robot
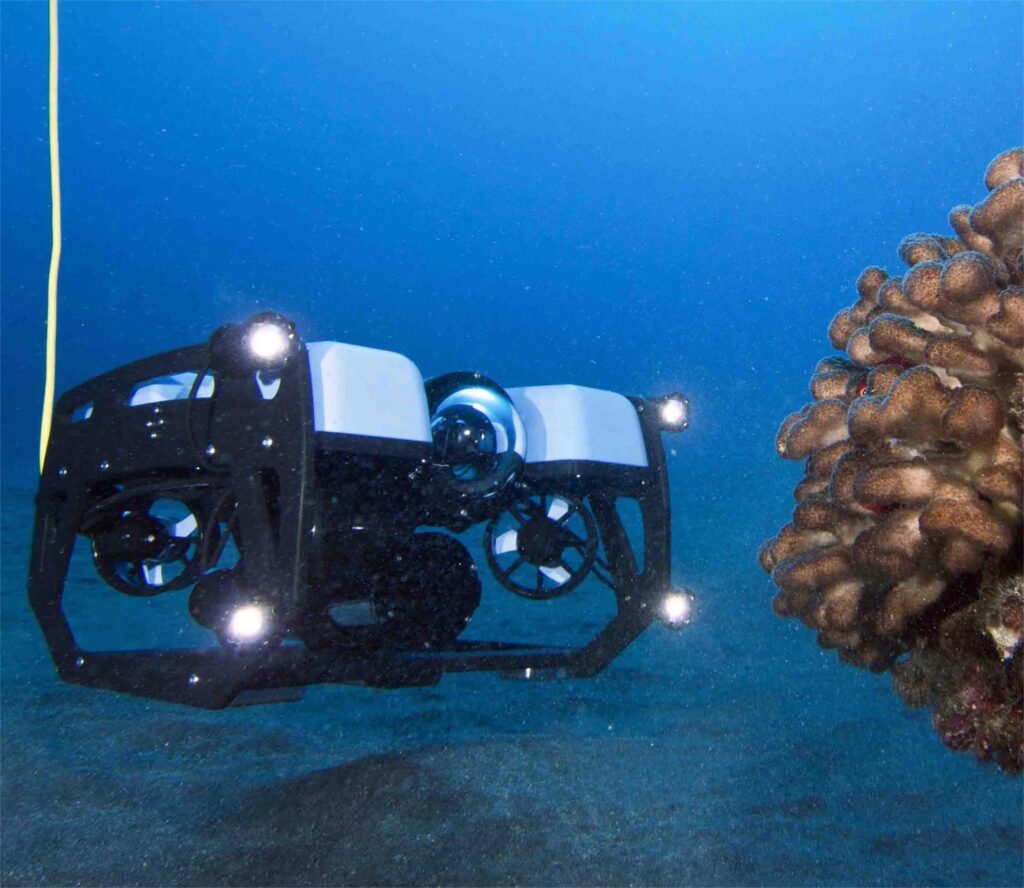
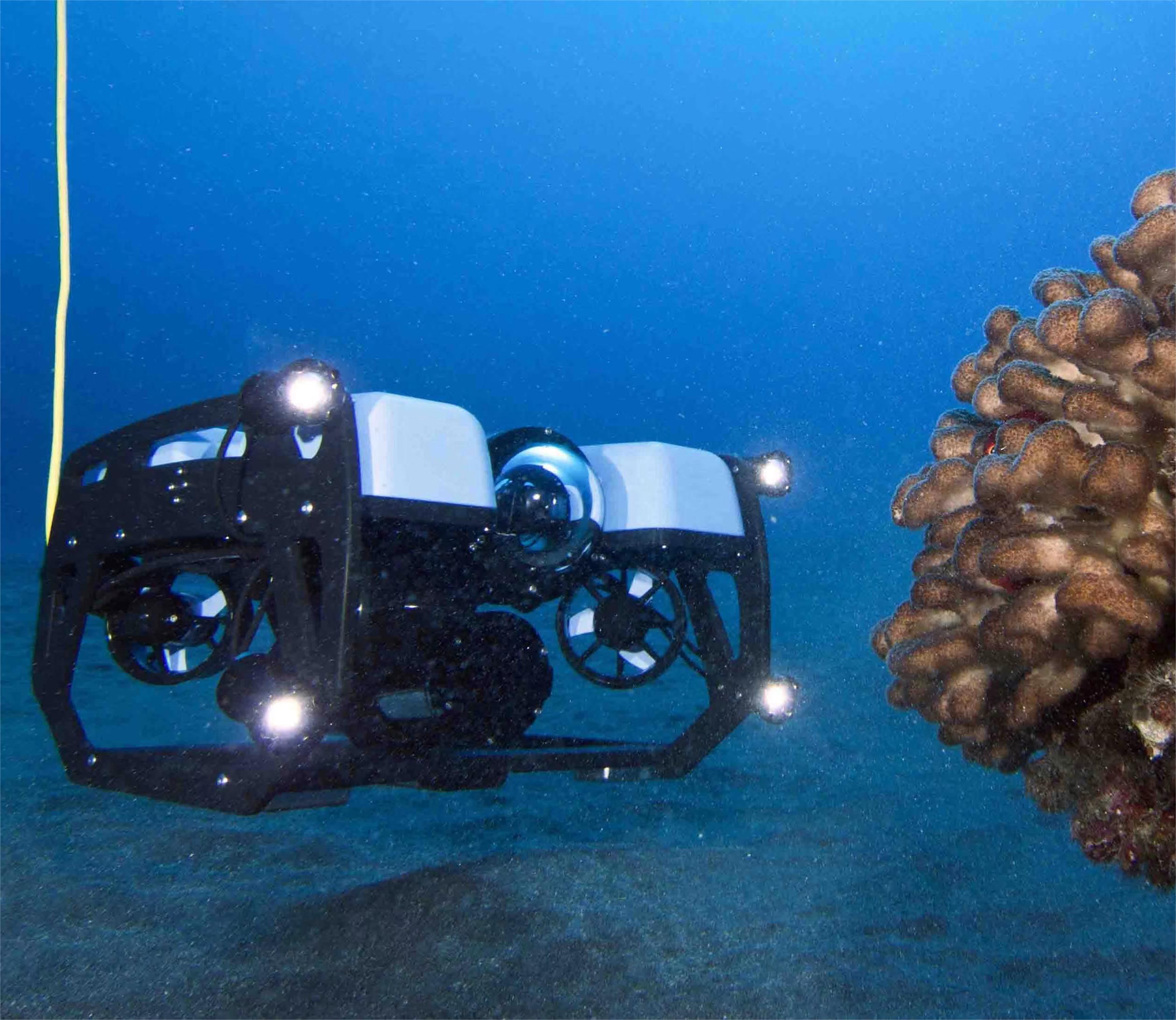
The KX-UR-300 Underwater Robot is an affordable, high-performance underwater vehicle. Its control unit and software source code are all open source, which has enough scalability and convenience of secondary development. Its excellent performance makes it ideal for practical applications such as underwater inspection, scientific research and underwater exploration.
Characteristics
●Highly Cost-effective
● 3 hours Long Standby
● High Scalability
● Open Source, Secondary Development
● Portable
KX-UR-300 Underwater Robot
ROV Ontology includes
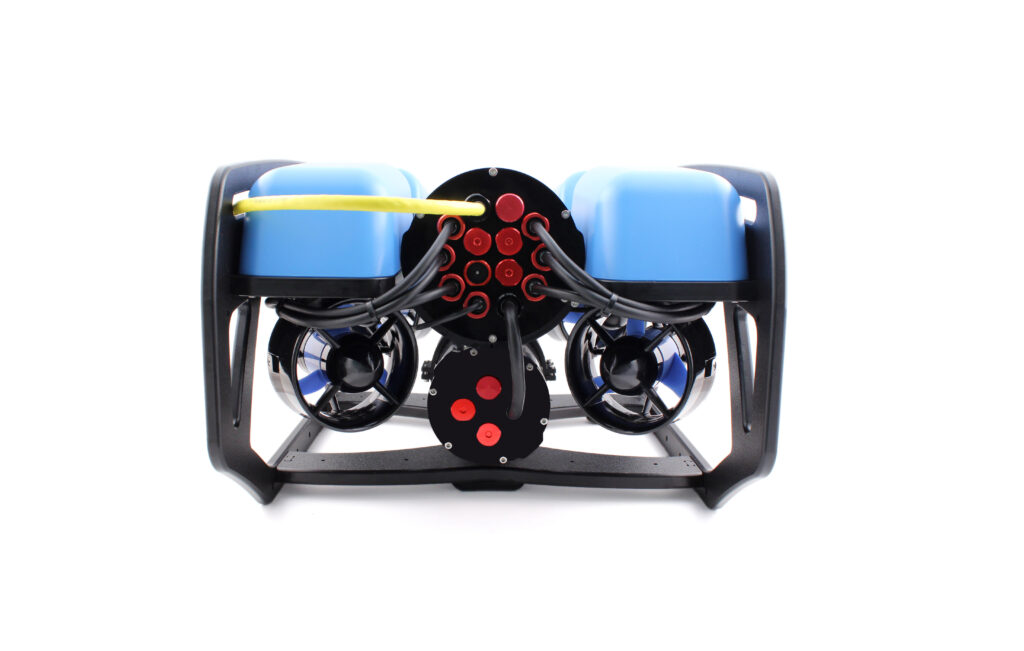
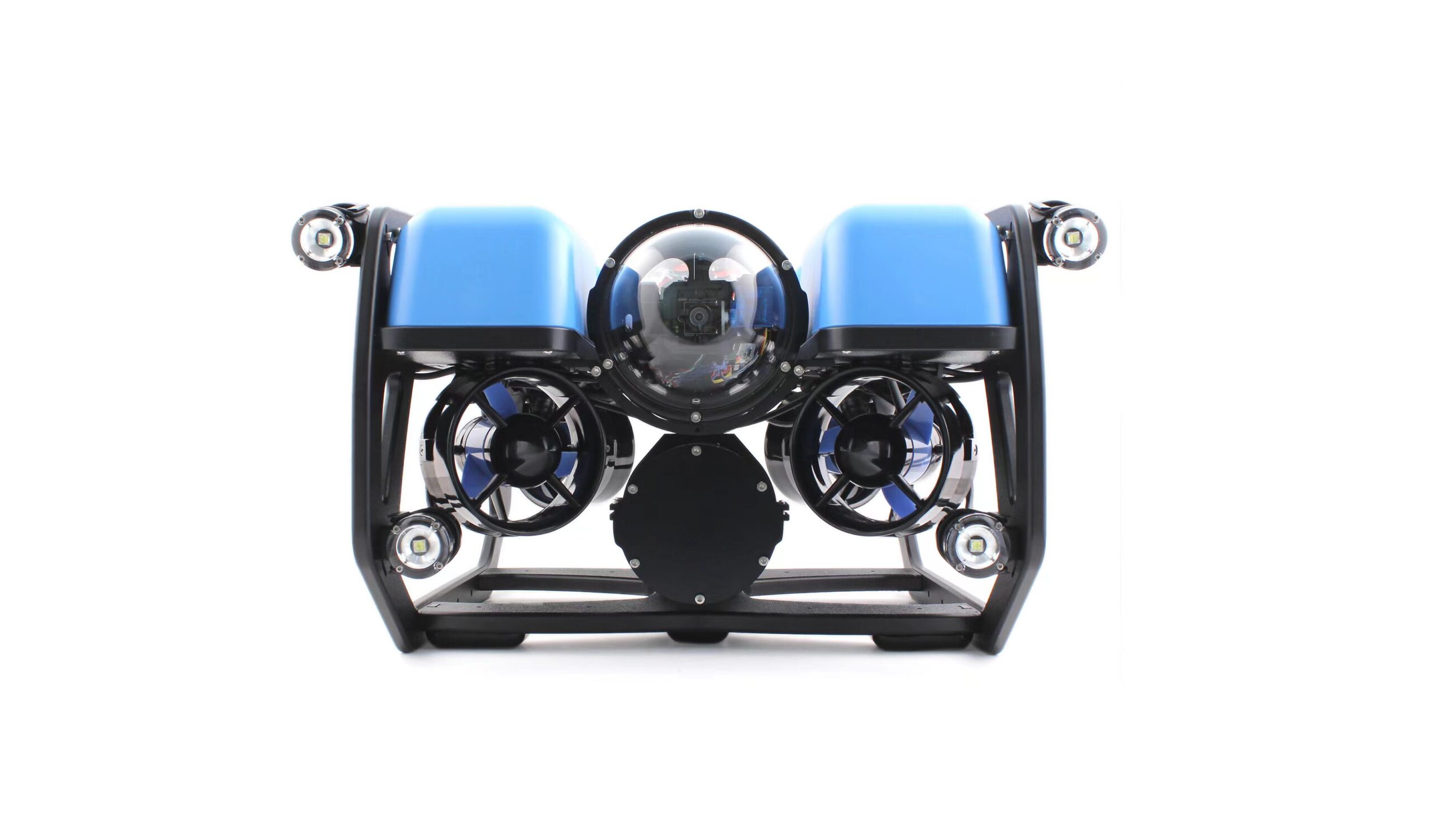
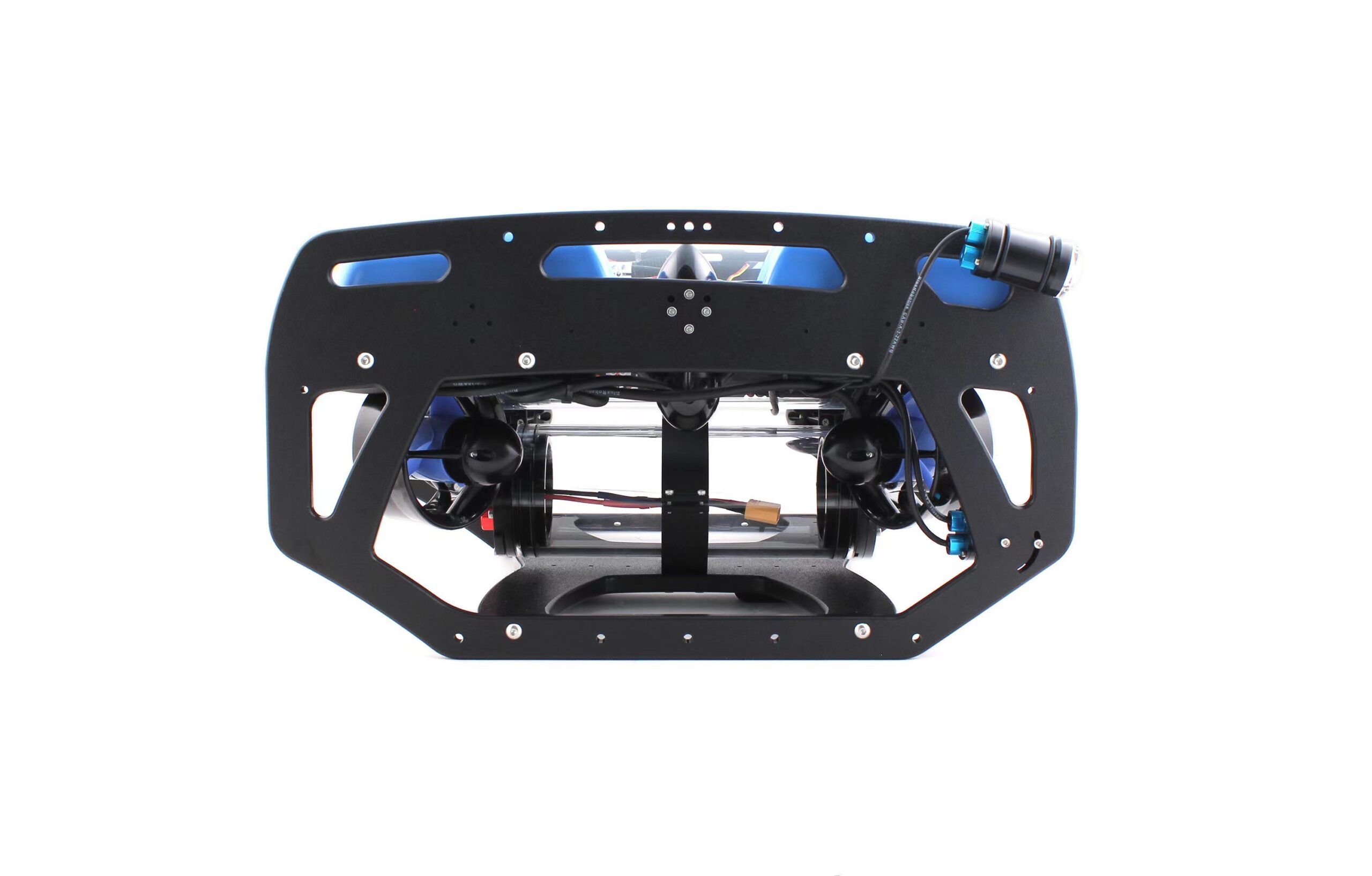
—— Six 200W brushless DC thrusters
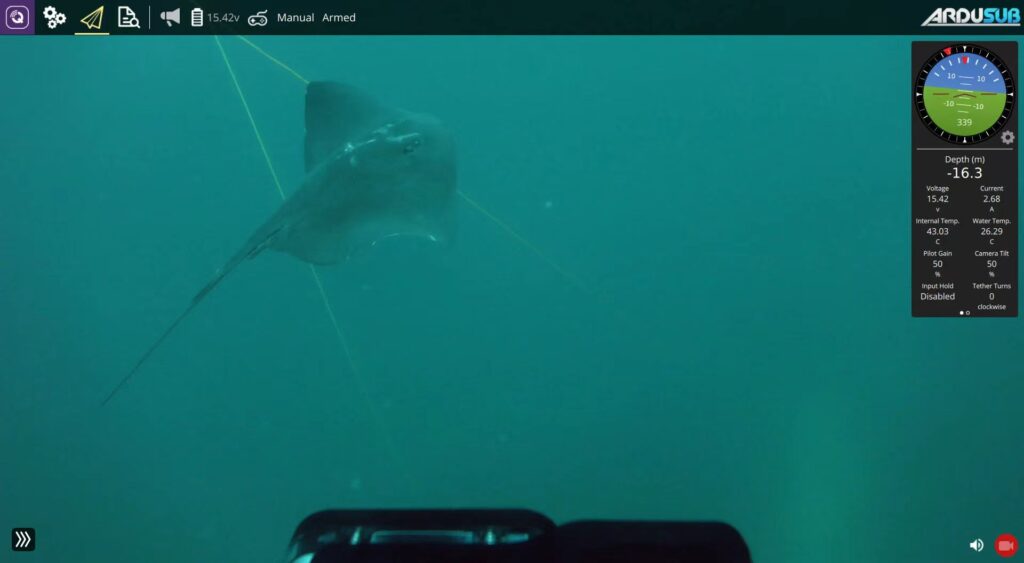
—— One 1080P PTZ camera
—— Two sets of 1500 lumen high-lighted LED lights (adjustable optical)
—— Six 200W brushless DC thrusters
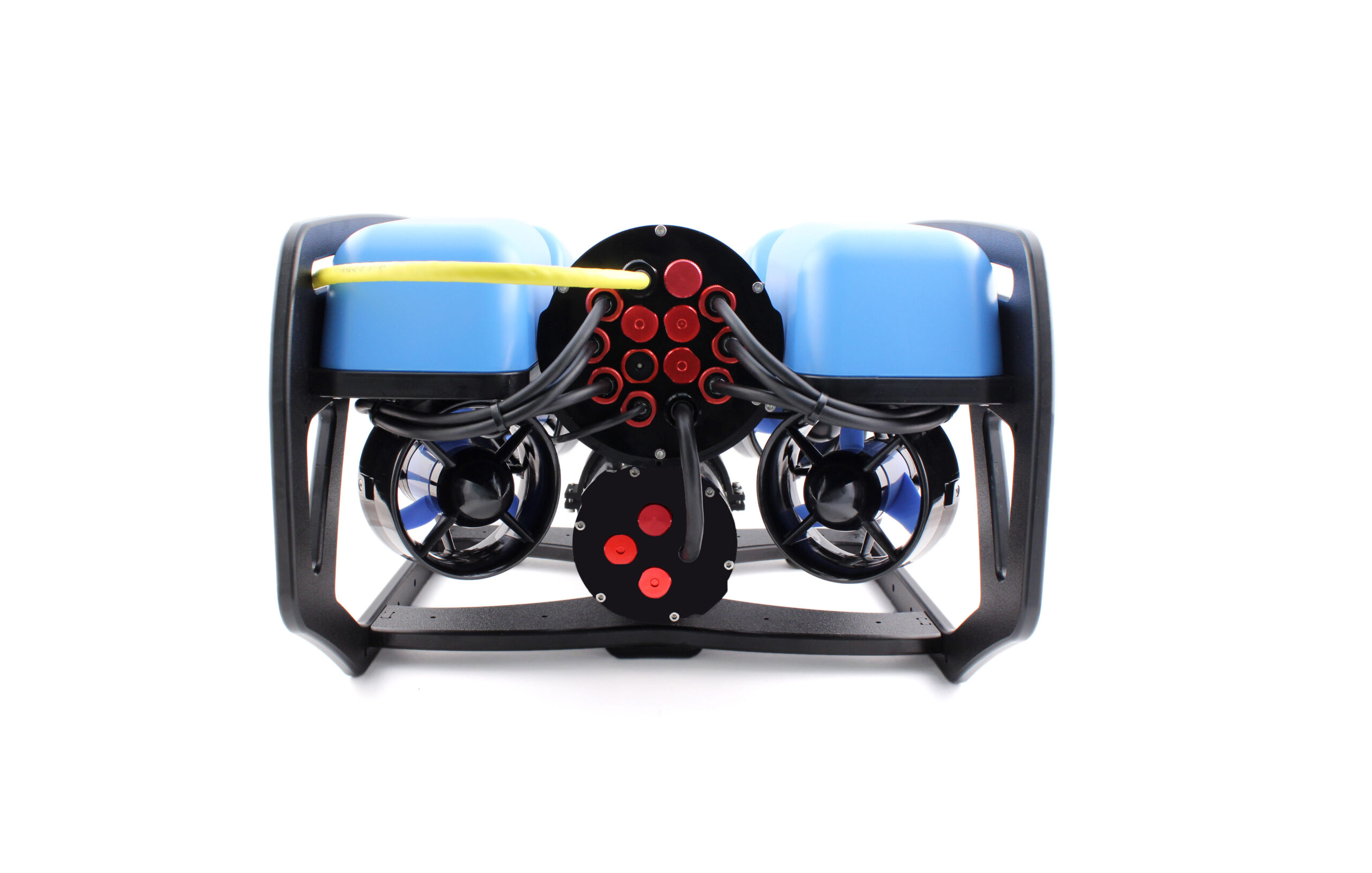
—— Equipped with gyroscope, accelerometer,magnetometer, internal barometer, depth sensor, voltage and galvanometer
Mechanism Parameters
Size…………….457×338x254mm
Weight in air…………………… 9~11kg
Load capacity………………………… 1kg
Working depth…………………….. 100m
Maximum forward speed….1.5m/s
Forward thrust……………………. 9kgf
Normal thrust………………………..7kgf
Lateral thrust……………………………9kgf
Electric Parameters
Working voltage……………………16.8V
Camera ISO……………………….. 0.01lux
Zero Buoyancy Cable
Mechanism Parameters
Standard length …………………… 100m
Tensile strength ………………… 150kg
Buoyancy in seawater. slightly neutral
Strength support…………………..Kevlar
Electric Parameters
Communication line………….4 core (2 pairs of twisted pair)
Optional Accessories
——Multi-beam imaging sonar
——Multi-degree of freedom robotic arm
——10.5/19 inch ground station
Inquiry:
Please Feel Free To Leave Your Needs Here, A Competitive Quotation Will Be Provided According To Your Requirement.


